據英國廣播公司報道,在英國斯特靈大學攻讀博士學位的華人學者耿濤最近研製成功能像真人一樣雙腿直立行走的機器人──Runbot,而且和人類的最快行走速度差不多。
這一成果發表在了最新一期的《計算生物學公共圖書館期刊》上。
耿濤是在一名英國導師和一位德國教授的指導下完成這一研究的。這一成果的突出意義在於,這個直立雙腿機器人的行走原理和真人一樣,而且具有適應地面狀況的學習能力。
耿濤的研究借用了20世紀30年代蘇聯運動生理學家尼古拉·伯恩斯坦的“運動感覺修正”原則,道理相當於控制論的“反饋”概念。
機器人的直立行走一直是科學家們久攻不下的難題,也是實現機器人“倣真”的關鍵一步。
近年這方面的研究興趣集中在了對人類行走模式的研究,引入了很多生物學原理。
傳統的觀點認為,要像人類一樣行走,機器人必須有一個隨時控制平衡和步伐節奏的“中樞”。
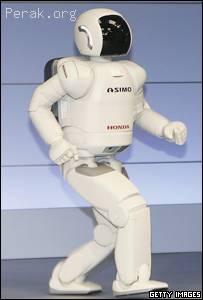
號稱世界最先進步行機器人的日本本田公司Asimo就是這類“動態平衡”機器人,需要隨時計算每一步的平衡,而且走路像是京劇中的“方步”。
但根據伯恩斯坦曾一度被人遺忘的觀點,腿部的“局部反射”而非大腦的“中央控制”在人類的行走中起更大作用。
如果仔細觀察,人類的行走實際是一連串不斷向前“跌倒”又不斷支撐自己的過程。
根據這一原理,義大利科學家曾經製成了一部叫做“呵啷呵啷”機械腿,能夠沿著坡道靠重力“走”下來。
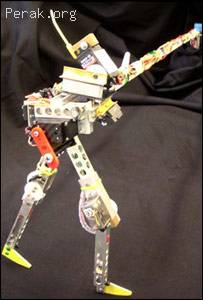
這次耿濤推出的Runbot則不僅可以和人一樣落前腳、抬後腳,邁步行走,而且步速可以達到每秒3.5個腿長,和人類的最快行走速度差不多,也比現有的雙腿機器人步速快一倍以上。
更引人注目的是,30釐米高的Runbot除了靠腿部的關節、感測器被動行走之外,還可以通過“大腦”主動學習,判斷並適應地形。
美中不足的是,Runbot還不能實現自主左右平衡,需要牽引來避免側向傾倒。
但耿濤的成果不僅使倣真機器人的研究向前邁出了重大一步,也將對脊髓損傷癱瘓病人的治療提供借鑒。