美國Carnegie Mellon大學的Yun Seong Song和Metin Sitti,模擬水黽——一種利用表面張力在水面上行走的昆蟲——製造出了一種能夠在水上高機動性行走的機器人。
他們的小機器人不同於其他利用浮力浮在水面的機器人,它的長腿和很輕的重量使其能夠利用表面張力而保持漂浮。他們預測這種小機器人能夠通過無線通訊使用在環境監測、教學、娛樂等用途中。
Sitti說:“水黽機器人——我們稱之為表面張力機器人昆蟲動力學探測器(STRIDEs)——能夠在僅3-4毫米深的水面行走。由於它的腿比那些基於浮力的機器人阻力更小,因而能量效率和敏捷性大大優於那些浮力型機器人。”當然,如果STRIDEs的尺度變大到米的量級,它的這些優點就都沒有了。
科學家們通過建模和計算分析,發現最佳的機器人腿為5釐米長,上面覆上一層特氟隆。12條這樣的腿連接在重1克的機身上,能夠提供9.3克的有效載荷。
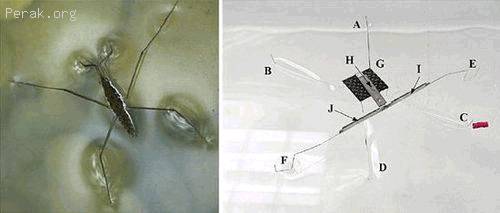
水黽使用特殊的槳狀腿通過划槳運動來進行移動。機器人也通過類似的方式來運動,3個連接在“T”型腿上的壓電制動器提供水準和垂直的運動,來完成移動所需的橢圓形划槳運動。水黽能夠以1.5米每秒的速度運動,而第一台機器人的運動速度為每秒3釐米,且能夠轉彎、旋轉和後退。
目前的機器人並不能在起伏較大的水面上行走,Sitti希望通過改進它的載重能力和防水性,使其能夠抵禦波浪和風暴。